拒水性能最高的羽绒服
由利郎(中国)有限公司设计研发的超强保暖科技拒水羽绒服,羽绒拒水性测试值达到10000分钟5级拒水。经世界纪录认证(WRCA)官方审核,被确认为“拒水性能最高的羽绒服”。纪录编号:WRC240108A利郎拒水羽绒2.0版本主打“放心机洗、快干蓬松”的概念,羽绒在水里震荡10000分钟,依然保持5级干燥。800+高蓬松度...




纪录编号:WRC230818A
纪录成绩:30.129米
纪录地点:中国大连
纪录时间:2023年9月13日
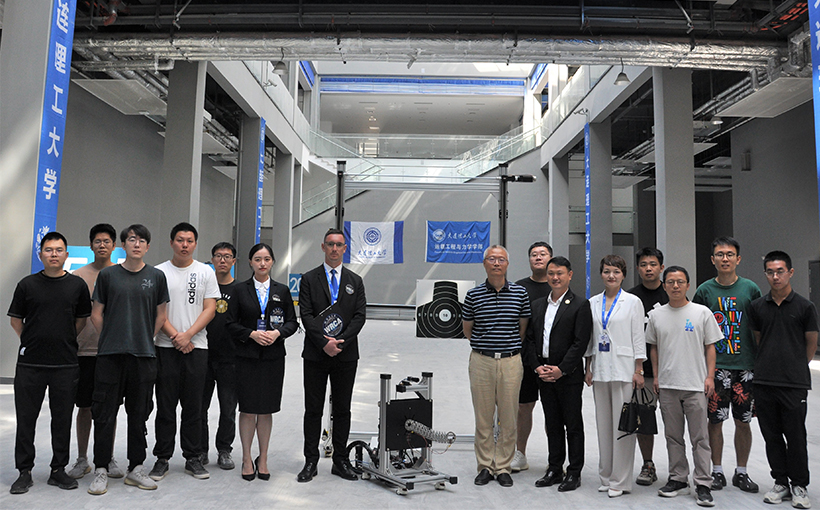
2023年9月13日,世界纪录认证(WRCA)英国总部委派认证官到大连理工大学进行现场审核,对彭海军教授团队设计研发的连续体机器人检查无误之后,开展远距离动态目标追踪挑战。挑战内容为:连续体机器人末端携带激光笔对移动人形标靶靶心自动识别跟踪,且激光笔命中移动标靶靶心的持续时间不得少于5秒,以最远距离情况满足上述要求为最终挑战结果。彭海军教授团队的连续体机器人分别在15m、20m、25m、30m等不同距离范围内进行多次测试评定。最终,经世界纪录认证(WRCA)官方现场审核通过世界纪录挑战,最远有效动态追踪距离为30.129米,被确认为“最远距离命中移动靶心的自主连续体机器人”。纪录编号:WRC230818A
针对连续体机器人采用视觉反馈追踪远距离动态目标这种挑战性问题,大连理工大学彭海军教授团队设计研发了张拉整体连续体机器人软硬件系统,提出了一种新的视觉伺服反馈高精度动态目标追踪方案。这种新方案使用连续体机器人末端位姿投影方式来代替现有视觉伺服反馈方案,投影的连续体机器人末端位姿信息可以由末端位置与目标位置在空间坐标系下建立几何映射关系。这种新方案既解除了对连续体机器人的整体位姿信息测量需求限制,又避免因为连续体机器人自身绳索驱动引发本体柔性振动,进而导致无法对动态目标信息进行有效视觉采集问题。基于这种新的几何映射关系,并在本团队前期瞬时最优反馈控制算法基础上,最终解决了远距离动态目标追踪问题。
The autonomous continuum robot designed and developed by Professor Peng Haijun's team at Dalian University of Technology, relying on an end-effector carrying a laser pen, achieved the longest distance of 30.129 meters to continuously hit and follow the moving target's center. Verified by the WRCA, the team successfully set the world record for "The autonomous continuum robot that hits the moving target center for the longest distance".
以上是“最远距离命中移动靶心的自主连续体机器人”的详细信息,您还可通过WRCA世界纪录认证官方网站或在百度中搜索纪录编号“WRC230818A”以获取更多相关资讯。
相关文章推荐
 驻华申报中心:400-661-8118
驻华申报中心:400-661-8118
 英国总部地址:
英国总部地址:
Hamilton House, Mabledon Place, London, United Kingdom
英国总部专线:0044-2039851520
英国中文专线:0044-2070483220
输入您的邮件地址可以订阅最新的世界纪录
Copyright © WRCA All Rights Reserved. 闽ICP备2022003236号-1
WRCA、WRCA世界纪录、WRCA世界纪录认证、WRCA世界影响力及WORLD RECORD(世界纪录)、WRCA世界纪录编号、World Record Certification(世界纪录认证)均为世界纪录认证公司(英国注册号 No10120392)的商标。在中国唯一授权控股企业:纪录时代(厦门)品牌管理有限公司特许授权使用并维权。保留所有权利。世界纪录认证公司官方图标和世界影响力相关知识产权已获官方授权,经英国政府公证,中国驻英国大使馆认证,世界纪录认证和世界影响力及官方标识未经书面授权不可擅自转载使用,本站部分数据案例来源于维基百科,百度百科,公开出版物及书籍,经WRCA世界纪录认证官方审核确认真实性后用于学术研究之用,本机构不做任何营利性使用,如数据审核有误,请联系我们,我们将及时更改。
申报中心地址:厦门市思明区会展南225号8层
电话:4006618118